






令和5年度分の文部科学省科学研究費助成事業(科研費)に採択されました。
当学院の古館裕大教員(生体医工学研究センター研究員)が令和5年度分の文科省科学研究費助成事業(科研費)に応募し、採択されました。
専門学校の教員の採択は他では見当たらず、快挙と言えます。函館市医師会看護・リハビリテーション学院(五稜郭キャンパス)生体医工学研究センターにおいて、これから更にリハビリテーションに役立つ研究を推進してゆく所存です。
生体医工学研究センターについてはごちら(クリックするとサイトが表示されますをご覧ください。
リハビリテーション機器を家庭に導入したい(以下は研究内容です)
研究種目名:2023年度若手研究
研究課題名:筐体と訓練をカスタマイズして分離運動の再獲得を図る家庭用片麻痺手指リハロボット
研究期間:3年(令和5年~令和8年)
この研究は、脳卒中の後遺症により左右どちらかの半身を上手く動かせなくなってしまった患者(片麻痺)の手指に着目し、退院後も患者が自宅で治療を受けられるロボットを開発するものです。手指は日常生活で使う頻度が極めて高い一方、麻痺の回復が遅い部位であることが知られており、自分の意志で自由に動かす動き(分離運動)が回復しないまま理学療法士・作業療法士の手を離れてしまう場合が多いです。このような現状に対し、「医療者の代わりに家でリハビリテーションをしてくれるロボット」を開発し、患者のQOL改善に向けて貢献していくことが本研究の最終目標となります。
本研究以外にも既にそのようなロボットは存在していますが、既存のものには、①手の状態によっては使えない(例.装着できない、センサで筋肉の動きを検知できない)、②回復度合いに応じて自動で治療プログラムを計画・実施できないなどの問題があり、ロボットが患者を選んでしまっている構図にあります。このため、高額なロボットを複数台導入すること無しに分離運動の回復まで至らない現状にあり、せっかくの便利な技術が社会に広く普及しにくい状況となっています。
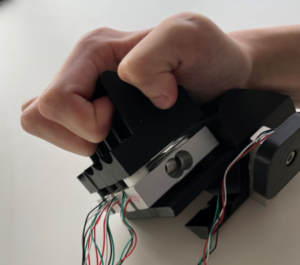
そこで本研究で、「片麻痺の重い人から軽い人までの治療を1台で完結できるロボットの開発」を行うことにしました。開発中のロボットが以下の図です。片麻痺の手は、病的な手の握りこみが発生することが特徴であるため、どんな握りこみの強さでも装着できるように、自由にカスタマイズできる筐体となっています。患者はこのロボットを使って、臨床でも行われている手を開く・個々の指を曲げ伸ばしする動きを訓練していきます。しかし現段階では、①カスタマイズ後の各筐体において手を開く・個々の指を曲げ伸ばす動きの補助する機構、②回復度合いを自動で評価してどんな動きを通して治療するかを自動でカスタマイズする仕組みが明らかとなっていないため、申請した研究課題で上記2点の実現方法を明らかにしていきます。